Unidad 1. Software para sistemas embebido
Introducción
En esta unidad vamos a aprender técnicas para programar los sistemas embebidos que permitirán capturar y/o generar información desde y hacia el mundo exterior de la aplicación interactiva.
Propósito de aprendizaje
Analizar la plataforma de hardware y software del controlador que se empleará como interfaz entre los sensores-actuadores y las plataformas de software interactivas a utilizar en el curso.
Construir aplicaciones simples para el controlador con el fin de explorar algunas posibilidades y características de su plataforma de software.
Modelar el software del controlador, mediante el uso de máquinas de estado, para poder establecer escenarios que permitan documentar y verificar su funcionamiento.
Implementar el software del controlador mediante las técnicas de programación adecuadas que permitan sacarle el máximo provecho a dicho controlador.
Verificar el software del controlador por medio de la comparación de resultados de funcionamiento con los posibles escenarios o vectores de prueba definidos en el modelado.
Temas
Introducción a la programación NO BLOQUEANTE.
Técnicas de programación: encapsulamiento mediante tareas, programación concurrente.
Modelamiento y programación utilizando máquinas de estado.
Manejo del puerto serial, medidas de tiempo y retardos utilizando técnicas de programación no bloqueantes.
Trayecto de actividades
Sesión 1
Ejercicio 1: Introducción a Git y GitHub
(Tiempo estimado: 1 hora 40 minutos)
Trabajo autónomo 1
(Tiempo estima: 1 horas 20 minutos)
Ejercicio 2: terminar sesión 1 y conseguir materiales
Termina la sesión 1 y trae para la próxima sesión presencial dudas, si es del caso.
Consigue algunos materiales para el curso.
Los materiales los puedes conseguir en didácticas electrónicas.
Sistema de desarrollo ESP32 similar a la versión DevKit. Solicitar el servicio de soldado de los pines.
Protoboard.
Cables conexión fácil macho a macho: paquete de 20.
4 LEDs.
4 resistencias de 1000 ohm.
3 pulsadores de patas largas para introducir en el protobard.
Sesión 2
Continuar con el Ejercicio 1
Trabajo Autónomo 2
Terminar la guía
Sesión 3
Ejercicio 3: introducción y ambiente de trabajo
Vamos a revisar entre todos este material introductorio.
El material anterior cubre los pasos necesarios para instalar y configurar el entorno de desarrollo de software bajo el framework de arduino. En este escenario se utilizan los lenguajes C y C++.
Ejercicio 4: flujo de trabajo
El flujo de trabajo para realizar aplicaciones con arduino será:
Crear un archivo nuevo. Este archivo inicia con dos funciones:
setup()yloop().La función setup se ejecuta solo una vez al momento de energizar el ESP32 o cuando se presiona el botón de reset.
La función loop será llamada constantemente por el framework de arduino.
Una vez escrita la parte de la aplicación que se desea probar, se debe compilar. El proceso de compilación verifica que el programa no tenga errores sintácticos y genera el código de máquina que posteriormente se cargará en la memoria de programa del ESP32. Para realizar la verificación y compilación se selecciona el primer ícono en la parte superior izquierda.
Una vez compilada la aplicación se procede a grabar la memoria del microcontrolador. Esto se realiza con el segundo ícono de la parte superior izquierda.
Finalmente se selecciona el ícono del monitor serial en la esquina superior derecha. Este ícono permite abrir la terminal serial por medio la cual se podrán visualizar los mensajes que el ESP32 le enviará al computador utilizando el objeto
Serial.
Vamos a probar todos los pasos anteriores con este programa:
void setup() {
Serial.begin(115200);
}
void loop() {
Serial.print("Hello from ESP32\n");
delay(1000);
}
Trabajo Autónomo 3
Vas a terminar los retos del a sesión 3.
Si ya terminaste los retos y te queda tiempo, por favor, repasa todo el material de la sesión 3.
Sesión 4
Ejercicio 5: API de arduino
En este enlace se pueden consultar muchas de las funciones disponibles para realizar programas usando el API de Arduino.
El siguiente programa permite encender y apagar un LED conectado a un puerto de entrada salida:
#define LED_PIN 5
void setup()
{
pinMode(LED_PIN, OUTPUT);
}
void loop()
{
digitalWrite(LED_PIN, HIGH);
delay(1000); // Wait for 1000 millisecond(s)
digitalWrite(LED_PIN, LOW);
delay(1000); // Wait for 1000 millisecond(s)
}
Para probar el siguiente programa, vas a necesitar utilizar el protoboard. Te voy a dejar un par de recursos para que ves cómo es por dentro un protoboard y cómo se usa:
El siguiente programa permite leer un puerto digital y encender y apagar un LED:
#define LED_PIN 5
#define PUSHBUTTON_PIN 32
void setup()
{
pinMode(LED_PIN, OUTPUT);
pinMode(PUSHBUTTON_PIN,INPUT_PULLUP);
}
void loop()
{
if(digitalRead(PUSHBUTTON_PIN) == HIGH){
digitalWrite(LED_PIN, HIGH);
}
else{
digitalWrite(LED_PIN, LOW);
}
}
Ejercicio 6: RETO
Antes de este reto monta el siguiente circuito en el protobard:
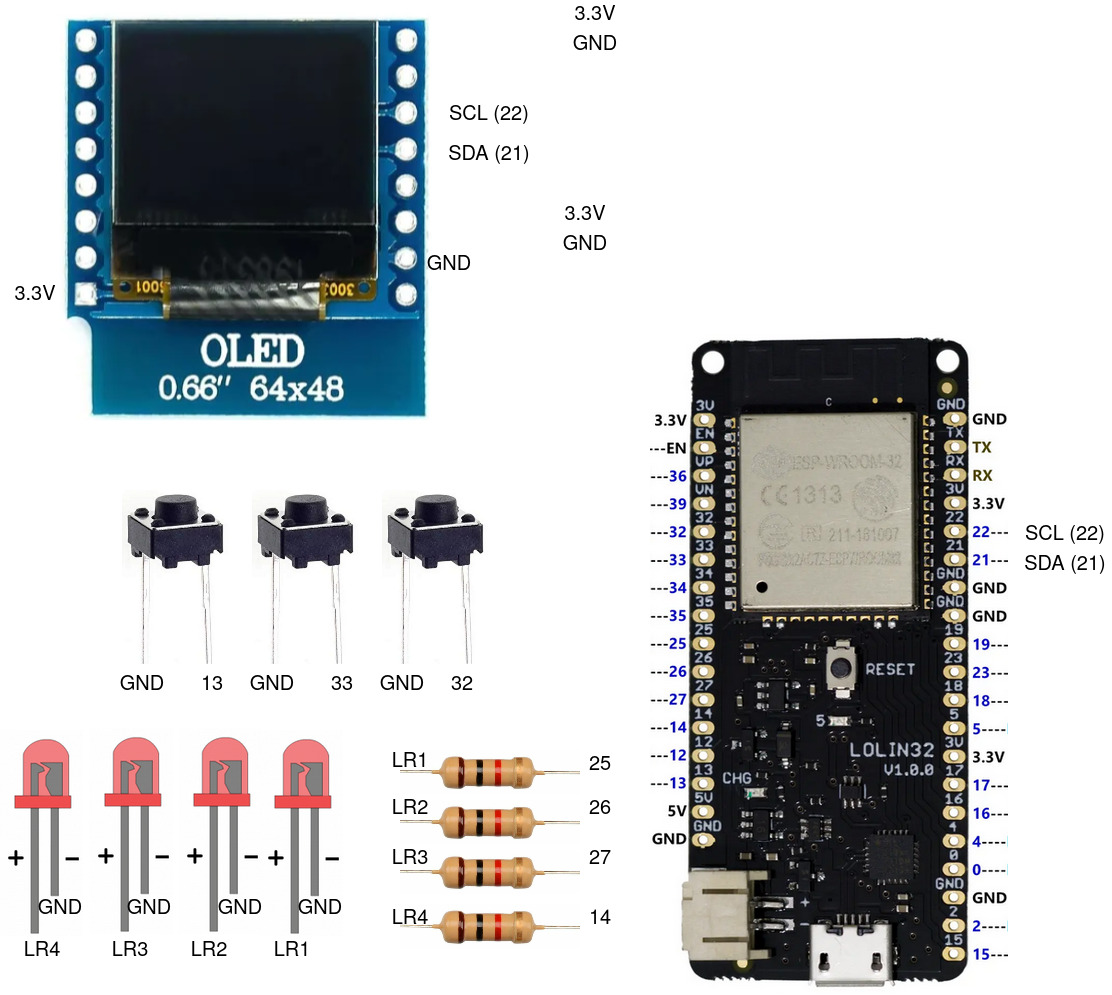
Este montaje no solo te permitirá abordar este reto, sino otros que vendrán.
Realiza un programa que lea el estado de dos switches y encienda solo uno de 4 LEDs (un LED para cada combinación posible de los suiches).
Ejercicio 7: puerto serial
En el siguiente ejercicio vas a explorar de manera básica el puerto serial del microcontrolador. Lee el programa, entiéndelo, realiza el montaje de hardware necesario y verifica su funcionamiento.
#define LED_PIN 5
#define PUSHBUTTON_PIN 32
void setup()
{
pinMode(LED_PIN, OUTPUT);
pinMode(PUSHBUTTON_PIN,INPUT_PULLUP);
Serial.begin(115200);
}
void loop()
{
if(digitalRead(PUSHBUTTON_PIN) == HIGH){
digitalWrite(LED_PIN, HIGH);
Serial.println("LED ON");
}
else{
digitalWrite(LED_PIN, LOW);
Serial.println("LED OFF");
}
}
Ejercicio 8: RETO
Modifica el código del reto anterior (ejercicio 6) para indicar, SOLO UNA VEZ, por el puerto serial cuál de los 4 LEDs está encendido.
Trabajo Autónomo 4
Revisa de nuevo toda la unidad hasta este punto. He realizado algunas actualizaciones al material para que complementes y SOBRE TODO repases y PUEDAS RECORDAR lo que ya has practicado.
Sesión 5
Ejercicio 9: variables static
Vamos a explorar un poco más el lenguaje de programación.
Analiza el siguiente código:
void setup() {
Serial.begin(115200);
}
void loop() {
uint8_t counter = 20;
counter++;
Serial.println(counter);
delay(100);
}
Compara el código anterior con este:
void setup() {
Serial.begin(115200);
}
void loop() {
static uint8_t counter = 20;
counter++;
Serial.println(counter);
delay(100);
}
¿Qué puedes concluir?
¿Para qué sirve la palabra reservada static?
¿Cuándo es necesario declarar una variable static?
Ejercicio 10: introducción al código no bloqueante
Analiza el siguiente ejemplo:
#define LED_PIN 5
const uint32_t interval = 1000;
void setup() {
// set the digital pin as output:
pinMode(LED_PIN, OUTPUT);
}
void loop() {
static uint32_t previousMillis = 0;
static uint8_t ledState = LOW;
uint32_t currentMillis = millis();
if (currentMillis - previousMillis >= interval) {
previousMillis = currentMillis;
if (ledState == LOW) {
ledState = HIGH;
} else {
ledState = LOW;
}
digitalWrite(LED_PIN,ledState);
}
¿Qué hace este programa?
¿Cómo funciona?
Ejercicio 11: RETO
Realice un programa que encienda y apague 4 LEDs a 1 Hz, 5 Hz, 7 Hz y 9 Hz respectivamente utilizando la técnica vista en el ejercicio anterior.
Ejercicio 12: arreglos
Analiza uno de los ejemplos que vienen con el SDK de arduino (modificado). Este ejemplo nos permite ver cómo podemos hacer uso de los arreglos para manipular varios LEDs:
int timer = 100; // The higher the number, the slower the timing.
int ledPins[] = {
25, 26, 27,14
}; // an array of pin numbers to which LEDs are attached
int pinCount = 4; // the number of pins (i.e. the length of the array)
void setup() {
// the array elements are numbered from 0 to (pinCount - 1).
// use a for loop to initialize each pin as an output:
for (int thisPin = 0; thisPin < pinCount; thisPin++) {
pinMode(ledPins[thisPin], OUTPUT);
}
}
void loop() {
// loop from the lowest pin to the highest:
for (int thisPin = 0; thisPin < pinCount; thisPin++) {
// turn the pin on:
digitalWrite(ledPins[thisPin], HIGH);
delay(timer);
// turn the pin off:
digitalWrite(ledPins[thisPin], LOW);
}
// loop from the highest pin to the lowest:
for (int thisPin = pinCount - 1; thisPin >= 0; thisPin--) {
// turn the pin on:
digitalWrite(ledPins[thisPin], HIGH);
delay(timer);
// turn the pin off:
digitalWrite(ledPins[thisPin], LOW);
}
}
Ejercicio 13: encapsulamiento en tareas
Analiza la estructura del siguiente código. Esta estructura te permitirá trabajar fácilmente en equipo porque puedes delegar las diferentes partes de la aplicación a varias personas. La idea es que cada persona pueda realizar una tarea.
Un pedido especial para ti. Recuerda:
¿Para qué se usa la palabra
staticen este caso?PREGUNTA DE INVESTIGACIÓN: ¿Qué ocurre con el programa si le quitas el static a las variables?
void setup() {
task1();
task2();
}
void task1(){
static uint32_t previousMillis = 0;
static const uint32_t interval = 1250;
static bool taskInit = false;
static const uint8_t ledPin = 25;
static uint8_t ledState = LOW;
if(taskInit == false){
pinMode(ledPin, OUTPUT);
taskInit = true;
}
uint32_t currentMillis = millis();
if ( (currentMillis - previousMillis) >= interval) {
previousMillis = currentMillis;
if (ledState == LOW) {
ledState = HIGH;
} else {
ledState = LOW;
}
digitalWrite(ledPin, ledState);
}
}
void task2(){
static uint32_t previousMillis = 0;
static const uint32_t interval = 370;
static bool taskInit = false;
static const uint8_t ledPin = 26;
static uint8_t ledState = LOW;
if(taskInit == false){
pinMode(ledPin, OUTPUT);
taskInit = true;
}
uint32_t currentMillis = millis();
if ( (currentMillis - previousMillis) >= interval) {
previousMillis = currentMillis;
if (ledState == LOW) {
ledState = HIGH;
} else {
ledState = LOW;
}
digitalWrite(ledPin, ledState);
}
}
void loop() {
task1();
task2();
}
Ejercicio 14: punteros
Vas a explorar un concepto fundamental de los lenguajes de programación
C y C++. Se trata de los punteros. Para ello, te voy a proponer que
escribas el siguiente programa. Para probarlo, debes abrir el monitor
serial y enviar un carácter. Asegúrate que en las configuraciones
del monitor serial tengas seleccionado No line ending y 115200.
void setup() {
Serial.begin(115200);
}
void loop() {
if(Serial.available()>0){ // Ha llegado al menos un dato por el puerto serial?
Serial.read(); // DEBO leer ese dato, sino se acumula y el buffer de recepción
// del serial se llenará.
uint32_t var= 0;
uint32_t *pvar = &var; // Almaceno en pvar la dirección de var.
Serial.print("var content: "); // Envía por el puerto serial el arreglo de caracteres
// "var content"
Serial.print(*pvar); // LEE el valor de var por medio de pvar
Serial.print('\n'); // Envía solo un carácter usas comillas sencillas.
*pvar = 10; // ESCRIBE el valor de var por medio de pvar
Serial.print("var content: ");
Serial.print(*pvar);
Serial.print('\n');
}
}
La variable pvar se conoce como puntero. Simplemente es una variable
en la cual se almacenan direcciones de otras variables. En este caso
en pvar se almacena la dirección de var. Nota que debes decirle al
compilador cuál es el tipo de la variable (uint32_t en este caso)
cuya dirección será almacenada en pvar.
Ahora responde las siguientes preguntas:
¿Cómo se declara un puntero?
¿Cómo se define un puntero? (cómo se inicializa)
¿Cómo se obtiene la dirección de una variable?
¿Cómo se puede leer el contenido de una variable por medio de un puntero?
¿Cómo se puede escribir el contenido de una variable por medio de un puntero?
Advertencia
IMPORTANTE
No avances hasta que este ejercicio no lo tengas claro.
Ejercicio 15: punteros y funciones
Ahora analiza este programa:
void setup() {
Serial.begin(115200);
}
void changeVar(uint32_t *pdata) {
*pdata = 10;
}
void printVar(uint32_t value) {
Serial.print("var content: ");
Serial.print(value);
Serial.print('\n');
}
void loop() {
if (Serial.available() > 0) {
Serial.read();
uint32_t var = 0;
uint32_t *pvar = &var;
printVar(*pvar);
changeVar(pvar);
printVar(var);
}
}
Nota entonces como pdata recibe el valor de la dirección de var que está almacenada en pvar.
Ejercicio 16: RETO
Realiza un programa que intercambie mediante una función el valor de dos variables definidas en la función loop.
Ejercicio 17: punteros y arreglos
Realiza el siguiente programa. Luego abre el monitor serial. Verifica
que en las configuración indique No line ending y la velocidad sea
115200. Envía 5 número de un solo dígito. ¿Qué hace el programa?
void setup(){
Serial.begin(115200);
}
void processData(uint8_t *pData, uint8_t size, uint8_t *res){
uint8_t sum = 0;
for(int i= 0; i< size; i++){
sum = sum + (pData[i] - 0x30);
}
*res = sum;
}
void loop(void){
static uint8_t rxData[5];
static uint8_t dataCounter = 0;
if(Serial.available() > 0){
rxData[dataCounter] = Serial.read();
dataCounter++;
if(dataCounter == 5){
uint8_t result = 0;
processData(rxData, dataCounter, &result);
dataCounter = 0;
Serial.println(result);
}
}
}
Piensa en las siguientes cuestiones:
¿Por qué es necesario declarar
rxDatastatic?dataCounter se define static y se inicializa en 0. Cada vez que se ingrese a la función loop dataCounter se inicializa a 0? ¿Por qué es necesario declararlo static?
Observa que el nombre del arreglo corresponde a la dirección del primer elemento del arreglo. Por tanto, usar en una expresión el nombre rxData (sin el operador []) equivale a &rxData[].
En la expresión
sum = sum + (pData[i] - 0x30);observa que puedes usar el puntero pData para indexar cada elemento del arreglo mediante el operador [].Finalmente, la constante
0x30en(pData[i] - 0x30)¿Por qué es necesaria? Porque al enviar un carácter numérico desde el monitor serial, este se envía codificado, es decir, se envía un byte codificado en ASCII que representa al número. Por tanto, es necesario decodificar dicho valor. El código ASCII que representa los valores del 0 al 9 es respectivamente: 0x30, 0x31, 0x32, 0x33, 0x34, 0x35, 0x36, 0x37, 0x38, 0x39. De esta manera, si envías el1recibirás el valor 0x31. Si restas de 0x31 el 0x30 obtendrás el número 1.
Trabajo Autónomo 5
Termina de realizar todos los ejercicios pendientes. Si vas al día, dale una nueva revisión al material.
Sesión 6
Ejercicio 18: comunicaciones seriales
En el siguiente video te explico como funcionan las comunicaciones seriales entre un sistema embebidos y una plataforma de cómputo interactiva.
Ejercicio 19: api serial de arduino
¿Dónde encuentro el API de arduino para el manejo del serial?
Las siguientes preguntas las responderemos en los próximos ejercicios, pero por ahora lee algunas de las funciones del API del serial y responde:
¿Cual es la diferencia entre print y println?
¿Cuál es la diferencia entre print y write?
¿Qué pasa si utilizas read() cuando available() te devuelva cero?
¿Cuál es la diferencia entre readBytes? y readBytesUntil()?
¿Qué pasa si quieres leer 10 bytes con readBytes pero solo se han recibido 3?
Ejercicio 20: análisis del api serial (investigación: hipótesis-pruebas)
Qué crees que ocurre cuando:
¿Qué pasa cuando hago un Serial.available()?
¿Qué pasa cuando hago un Serial.read()?
¿Qué pasa cuando hago un Serial.read() y no hay nada en el buffer de recepción?
Un patrón común al trabajar con el puerto serial es este:
if(Serial.available() > 0){
int dataRx = Serial.read()
}
¿Cuántos datos lee Serial.read()?
¿Y si quiero leer más de un dato? No olvides que no se pueden leer más datos de los disponibles en el buffer de recepción porque no hay más datos que los que tenga allí.
Ejercicio 21: buffer de recepción
Así se pueden leer 3 datos que han llegado al puerto serial:
if(Serial.available() >= 3){
int dataRx1 = Serial.read()
int dataRx2 = Serial.read()
int dataRx3 = Serial.read()
}
¿Qué escenarios podría tener en este caso?
if(Serial.available() >= 2){
int dataRx1 = Serial.read()
int dataRx2 = Serial.read()
int dataRx3 = Serial.read()
}
Para responder, es necesario que experimentes. ESTOS son los ejercicios que realmente te ayudarán a aprender.
Ejercicio 22: miniRETO
Piense cómo podrías hacer lo siguiente:
void taskSerial(){
// Esta tarea tiene su propio buffer de recepción,
// es decir, su propio vector. Nadie más tiene acceso
}
void loop(){
taskSerial();
}
En taskSerial almacena los datos del serial en su propio buffer de recepción (el buffer será un arreglo).
El buffer debe estar encapsulado en la tarea.
Los datos almacenados en el buffer no se pueden perder entre llamados a taskSerial(). La función taskSerial() se llama en la función loop.
La tarea taskSerial() debe tener algún mecanismo para ir contando la cantidad de datos que han llegado. ¿Cómo lo harías?
Ejercicio 23: terminal serial
Vamos a detenernos un momento en el software del lado del computador: el terminal. Veamos dos de ellas, la terminal de arduino y esta otra (scriptcommunicator)
Considera el siguiente programa
void setup()
{
Serial.begin(9600);
}
void loop()
{
if(Serial.available() > 0){
Serial.read();
int8_t var = -1;
Serial.println("Inicio de la prueba");
Serial.write(var);
Serial.print("\n");
Serial.print(var);
Serial.print('\n');
Serial.println("Fin de la prueba");
}
}
Ejecuta el programa
¿Qué observas en la terminal de arduino justo en estas dos líneas?
Serial.write(var);
Serial.print(var);
¿Qué observas en Scriptcommunicator para las dos líneas anteriores?
Ejercicio 24: miniRETO
Considera el siguiente código para analizar en Scriptcommunicator:
void setup()
{
Serial.begin(9600);
}
void loop()
{
if(Serial.available() > 0){
Serial.read();
int8_t var = 255;
int8_t var2 = 0xFF;
Serial.write(var);
Serial.print(var);
Serial.write(var2);
Serial.print(var2);
}
}
Explica qué está ocurriendo en cada caso.
Ejercicio 25: máquinas de estado
Este ejercicio lo vamos a realizar todos juntos:
Una aplicación interactiva posee un sensor que produce ruido eléctrico al cambiar de estado. La siguiente figura, capturada con un osciloscopio muestra la señal del sensor.
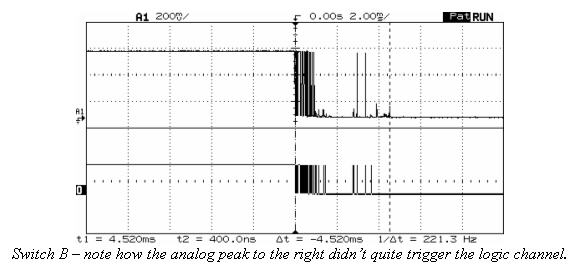
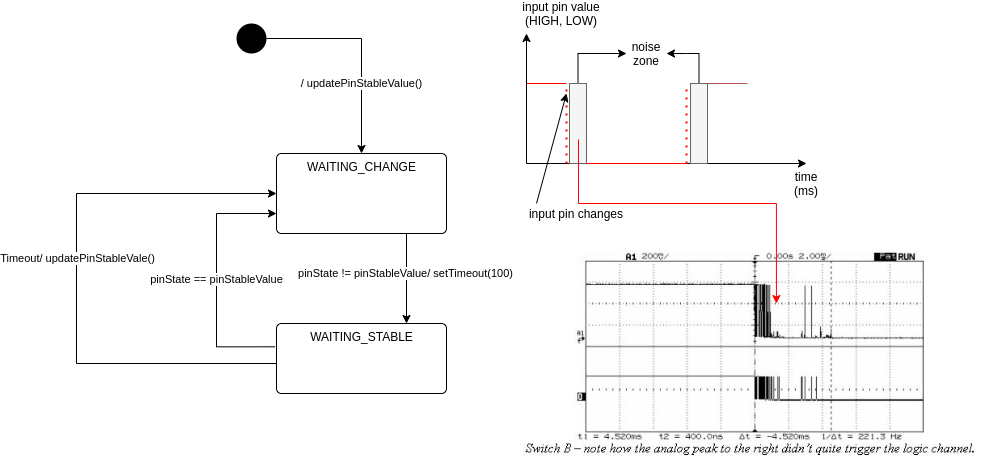
En la figura se observa el ruido generado en la transición de la señal al pasar del estado alto al estado bajo; sin embargo, el mismo fenómeno ocurre al cambiar del estado bajo al alto. Nota que además pueden ocurrir falsos positivos en la señal, que se manifiestan como pulsos de muy corta duración. Un ingeniero electrónica experto nos indica que podemos considerar un cambio de estado en el sensor siempre que la señal esté estable por lo menos durante 100 ms, es decir, sin ruido y sin falsos positivos. Se debe realizar una aplicación que filtre el comportamiento ruidoso del sensor y reporte por un puerto serial únicamente los valores estables de la señal.
Para este ejercicio debes:
Realizar un diagrama con el modelo en máquinas de estado para la aplicación
Definir escenarios de prueba usando diagramas de secuencias.
Implementar el modelo.
Verificar los escenarios definidos
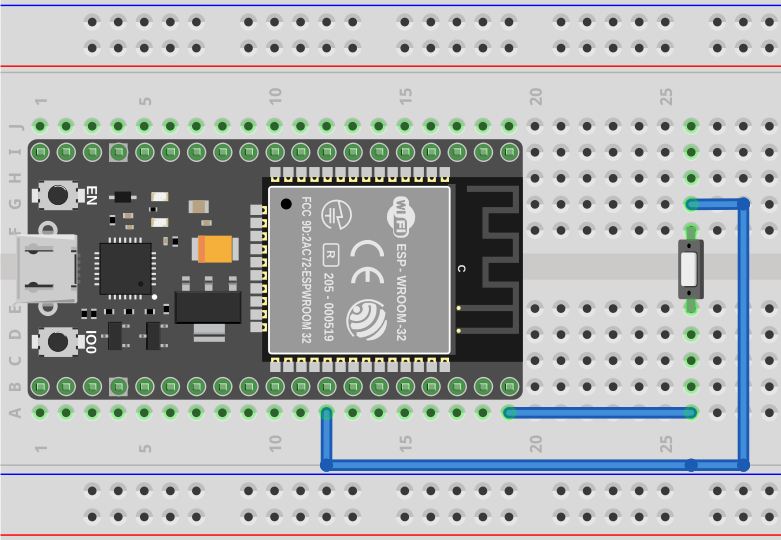
Te muestro un posible montaje en el protoboard para solucionar el ejercicio 30. Para este montaje elegí como puerto de entrada el número 19. Tu debes seleccionar el puerto que más te convenga en un tu microcontrolador. SI NO QUIERES hacer cambios al montaje que ya tienes, recuerda que debes los pulsadores están conectados a los puertos 13, 32 y 33. No olvides modificar el puerto en el siguiente código en caso de ser necesario.
Mira un posible diagrama de estados y un video corto donde te explico el diagrama:
Definición de los escenarios de prueba:
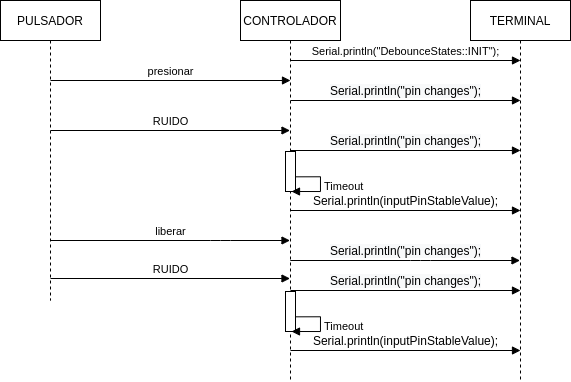
El código de la solución será este:
void setup() {
Serial.begin(115200);
}
void task() {
enum class DebounceStates {INIT, WAITING_CHANGE, WAITING_STABLE};
static DebounceStates debounceState = DebounceStates::INIT;
static uint8_t inputPinStableValue;
static uint32_t referenceTime;
const uint8_t INPUTPIN = 19;
const uint32_t STABLETIMEOUT = 100;
switch (debounceState) {
case DebounceStates::INIT: {
pinMode(INPUTPIN, INPUT_PULLUP);
inputPinStableValue = digitalRead(INPUTPIN);
debounceState = DebounceStates::WAITING_CHANGE;
Serial.println("DebounceStates::INIT");
break;
}
case DebounceStates::WAITING_CHANGE: {
if (digitalRead(INPUTPIN) != inputPinStableValue) {
referenceTime = millis();
debounceState = DebounceStates::WAITING_STABLE;
Serial.println("pin changes");
}
break;
}
case DebounceStates::WAITING_STABLE: {
uint8_t pinState = digitalRead(INPUTPIN);
if ( pinState == inputPinStableValue) {
debounceState = DebounceStates::WAITING_CHANGE;
}
else if ( (millis() - referenceTime) >= STABLETIMEOUT) {
inputPinStableValue = pinState;
debounceState = DebounceStates::WAITING_CHANGE;
Serial.print("pinState:");
Serial.println(inputPinStableValue);
}
break;
}
default:
Serial.println("Error");
break;
}
}
void loop() {
task();
}
Explicación del código:
Verificación de los escenarios de prueba:
Trabajo Autónomo 6
Revisa el material de la unidad hasta este punto. RECUERDA que la próxima semana tendremos la evaluación de la UNIDAD 1. Para solucionar el problema que te daré y realizar la documentación tendrás 6 horas. ES IMPORTANTE entonces que te prepares para la evaluación revisando DETENIDAMENTE el material trabajado hasta ahora.
Sesión 7
Continuarás realizando los ejercicios de las sesiones 5 y 6.
Trabajo Autónomo 7
Continua trabajando en los ejercicios de las sesiones 5 y 6.
Sesión 8
Trata de finalizar los ejercicios de las sesiones 5 y 6.
Trabajo Autónomo 8
Continua trabajando en los ejercicios de la unidad y avanza todo lo que puedas.
Sesión 9
Continuarás realizando los ejercicios de las sesiones 5 y 6.
Trabajo Autónomo 9
Continua trabajando en los ejercicios de las sesiones 5 y 6.
Sesión 10
Trata de finalizar los ejercicios de las sesiones 5 y 6.
Trabajo Autónomo 10
Dale una mirada rápida a todo el material de la unidad y detente en aquellos ejercicios donde requieras refrescar los conceptos.
Evaluación de la unidad
Enunciado
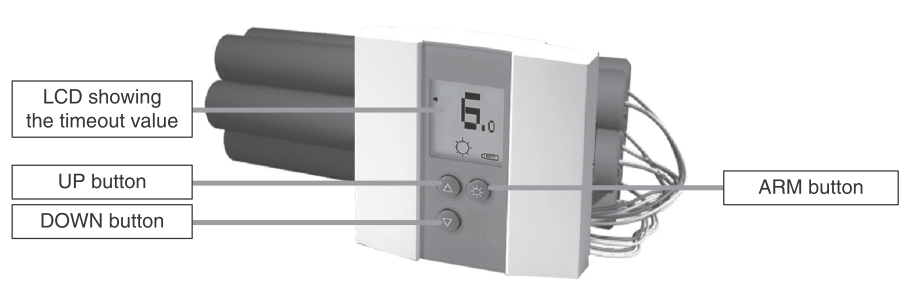
En un escape room se requiere construir una aplicación para controlar una bomba temporizada. La siguiente figura ilustra la interfaz de la bomba. El circuito de control de la bomba está compuesto por tres sensores digitales, en este caso pulsadores, denominados UP, DOWN, ARM, un display (LCD), un LED que indica si la bomba está contando o no y una salida digital para activar la bomba (otro LED).
El controlador funciona así:
Inicia en modo de configuración, es decir, sin hacer cuenta regresiva aún, la bomba está
desarmada. El valor inicial del conteo regresivo es de 20 segundos.En el modo de configuración, los pulsadores UP y DOWN permiten aumentar o disminuir el tiempo inicial de la bomba. El LED de bomba contando está PERMANENTEMENTE encendido.
El tiempo se puede programar entre 10 y 60 segundos con cambios de 1 segundo.
El tiempo de configuración se debe visualizar en el LCD.
El pulsador ARM arma la bomba.
Una vez armada la bomba, comienza la cuenta regresiva que será visualizada en el LCD por medio de una cuenta regresiva en segundos. El LED que indica que la bomba está contando enciende y apaga a una frecuencia de 1Hz.
La bomba explotará (se activa la salida de activación de la bomba) cuando el tiempo llegue a cero. En este punto el control regresará al modo de configuración.
Una vez la bomba esté armada es posible desactivarla ingresando un código de seguridad. El código será la siguiente secuencia de pulsadores presionados uno después de otro: UP,UP,DOWN, DOWN, UP, DOWN, ARM.
Si la secuencia se ingresa correctamente la bomba pasará de nuevo al modo de configuración de lo contrario continuará la fatal cuenta regresiva.
Requisitos
R01: debes almacenar la clave de desarmado de la bomba en una arreglo.
R02: debes definir una función a la cual le pasarás la dirección en memoria de dos arreglos: uno con la clave recibida y otro con la clave correcta. La función deberá devolver un bool así: true si la clave recibida es igual a la clave almacenada o false si las claves no coinciden.
Entregables
Tu repositorio para la evaluación está aquí.
Para poder usar el display vas a necesitar instalar una biblioteca. La puedes encontrar en el Administrador de bibliotecas usando la siguiente cadena de búsqueda:
ESP8266 and ESP32 OLED driver for SSD1306 displays. El administrador lo encuentras en el menú Programa, Incluir Librería, Administrar Bibliotecas. Si el idioma está en inglés buscas por Sketch, Include Library, Manage Library.
Criterios de evaluación
Solución completa del problema: 5 unidades.
Solución completa del problema sin cumplir R01 y/o R02: 4 unidades.
Solución parcial del problema: 2 unidades.