Unidad 3. Protocolos binarios
Introducción
En esta unidad seguiremos profundizando en la integración de dispositivos periféricos a aplicaciones interactivas utilizando hilos y protocolos binarios.
Propósitos de aprendizaje
Integrar aplicaciones interactivas y periféricos utilizando hilos y protocolos seriales binarios.
Temas
Protocolos binarios.
Diferencia entre los protocolos binarios y los protocolos ASCII.
Técnicas de programación basadas en máquinas de estado.
Trayecto de acciones
Sesión 1
Ejercicio 1: introducción a los protocolos binarios - caso de estudio
¿Cómo se ve un protocolo binario?
Para responder esta pregunta vamos a utilizar como ejemplo este sensor. Cuyo manual del fabricante se encuentra aquí
Explora la documentación, pero lee con mucho detalle hasta la página 5.
Ejercicio 2: API de arduino para implementar comunicaciones binarias
Recuerda el API de arduino para el manejo del serial. En particular los siguientes métodos:
Serial.available()
Serial.read()
Serial.readBytes(buffer, length)
Serial.write()
Nota que la siguiente función no está en el repaso:
Serial.readBytesUntil()
La razón es que en un protocolo binario usualmente no tenemos
un carácter de fin de trama, como si ocurre con los protocolos
ASCII, donde usualmente el último carácter es el \n.
Analiza de nuevo el API, en particular los métodos resaltados.
Ejercicio 3: aplicación para depurar las comunicaciones binarias
Mira este documento del fabricante del sensor. Podrás ver unos ejemplos de tramas.
Utiliza ScriptCommunicator para reproducir al menos un par de tramas. ¿Qué tienes que hacer para enviar por el serial las tramas? (Explora y pregúntale a tu profesor).
¿Qué busco que practiques en este caso? Que explores ScriptCommunicator
Trabajo autónomo 1
(Tiempo estimado: 1 horas 20 minutos)
RETO 1: técnica de programación del controlador
En una experiencia interactiva se requiere comunicar un controlador con una aplicación interactiva (AI). El controlador maneja varios sensores y varios actuadores.
Para este reto vas a simular la AI usando ScriptCommunicator.
Profe ¿Por qué no puedo usar el programa MONITOR de arduino?
ScriptCommunicator te permite controlar de manera precisa el byte que deseas transmitir. Recuerda que al usar una terminal como la de arduino, todos los bytes que transmites están codificados en ASCII y por tanto cuando escribes el carácter “1” realmente estás transmitiendo el byte 31 en base 16, es decir, la codificación ASCII del “1”.
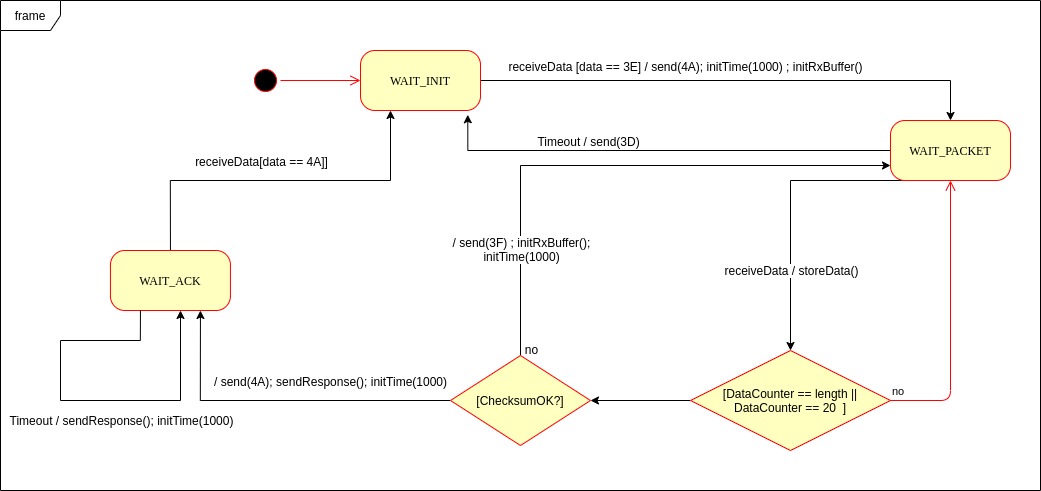
Los PASOS para realizar la comunicación son:
La AI inicia una transacción enviando el byte 3E.
El controlador deberá responder con el byte 4A.
La AI no podrá continuar hasta no recibir la respuesta del controlador.
Una vez el controlador responda, la AI enviará una secuencia de
n+1bytes.Cada byte tendrá la siguiente función:
Byte 1: indica la longitud de la secuencia de bytes.
Byte 2: byte reservado
Byte 3: indica el comando que deseamos que el controlador realice.
Byte 4 a n: aquí están los datos relacionados con el comando enviado
Byte n+1: checksum
El byte de ckecksum será calculado mediante una
XORrealizada entre todos los bytes que serán transmitidos, menos el último, que es el checksum. En lenguaje C el operadorXORes^. Por tanto, la operación a realizar será algo como esto:Byte1 ^ Byte2 ^ … ^ Byten.Si la AI se demora más de un 1 segundo en enviar la secuencia, el controlador enviará a la AI el byte 3D y la AI deberá iniciar de nuevo la secuencia de comunicación desde el paso 1.
Tanto el controlador como la AI deben calcular el checksum. La AI debe hacerlo para poder transmitirlo y el controlador para comparar si el valor que obtiene es el mismo que recibe. De esta manera el controlador puede identificar si los datos recibidos llegaron bien o no.
Si controlador detecta que el byte de ckecksum no corresponde, deberá enviar a la AI byte 3F y la AI deberá reenviar el paquete.
Si el controlador recibe bien el paquete deberá responder a la AI con el byte 4A y luego enviar la siguiente secuencia de bytes:
Byte 1: longitud de la secuencia de bytes que enviará
Byte 2 a Byte m: corresponden a los bytes 4 al byte n recibidos desde la AI
Byte m+1: checksum.
El checksum en este caso se calcula desde el byte 1 hasta el byte m.
Si la AI recibe correctamente el paquete deberá responder con el byte 4A.
El controlador quedará preparado para volver al paso 1, es decir, iniciar una nueva transacción.
Si pasado 1 segundo el controlador no recibe el 4A, entonces este deberá retransmitir el paquete a la AI. Este comportamiento solo se detendrá una vez la AI envié el 4A.
Advertencia
ALERTA DE SPOILER
Te dejo una posible solución al reto
Un posible modelo de la solución es este:
Y una posible implementación del modelo es este otro modelo en C++:
void taskCom();
void setup() {
taskCom();
}
void loop() {
taskCom();
}
void taskCom() {
enum class StateTaskCom {INIT, WAIT_INIT, WAIT_PACKET, WAIT_ACK};
static StateTaskCom state = StateTaskCom::INIT;
static uint8_t bufferRx[20] = {0};
static uint8_t dataCounter = 0;
static uint32_t timerOld;
static uint8_t bufferTx[20];
switch (state) {
case StateTaskCom::INIT:{
Serial.begin(115200);
state = StateTaskCom::WAIT_INIT;
break;
}
case StateTaskCom::WAIT_INIT:{
if (Serial.available()) {
if (Serial.read() == 0x3E) {
Serial.write(0x4A);
dataCounter = 0;
timerOld = millis();
state = StateTaskCom::WAIT_PACKET;
}
}
break;
}
case StateTaskCom::WAIT_PACKET:{
if ( (millis() - timerOld) > 1000 ) {
Serial.write(0x3D);
state = StateTaskCom::WAIT_INIT;
}
else if (Serial.available()) {
uint8_t dataRx = Serial.read();
if (dataCounter >= 20) {
Serial.write(0x3F);
dataCounter = 0;
timerOld = millis();
state = StateTaskCom::WAIT_PACKET;
}
else {
bufferRx[dataCounter] = dataRx;
dataCounter++;
// is the packet completed?
if (bufferRx[0] == dataCounter - 1) {
// Check received data
uint8_t calcChecksum = 0;
for (uint8_t i = 1; i <= dataCounter - 1; i++) {
calcChecksum = calcChecksum ^ bufferRx[i - 1];
}
if (calcChecksum == bufferRx[dataCounter - 1]) {
bufferTx[0] = dataCounter - 3; //Length
calcChecksum = bufferTx[0];
// Calculate Tx checksum
for (uint8_t i = 4; i <= dataCounter - 1; i++) {
bufferTx[i - 3] = bufferRx[i - 1];
calcChecksum = calcChecksum ^ bufferRx[i - 1];
}
bufferTx[dataCounter - 3] = calcChecksum;
Serial.write(0x4A);
Serial.write(bufferTx, dataCounter - 2);
timerOld = millis();
state = StateTaskCom::WAIT_ACK;
}
else {
Serial.write(0x3F);
dataCounter = 0;
timerOld = millis();
state = StateTaskCom::WAIT_PACKET;
}
}
}
}
break;
}
case StateTaskCom::WAIT_ACK:{
if ( (millis() - timerOld) > 1000 ) {
timerOld = millis();
Serial.write(bufferTx, dataCounter - 2);
} else if (Serial.available()) {
if (Serial.read() == 0x4A) {
state = StateTaskCom::WAIT_INIT;
}
}
break;
}
}
}
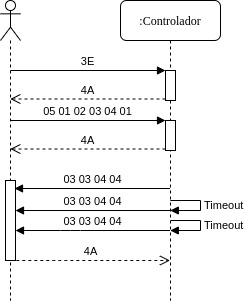
Un ejemplo de una escenario de prueba:
Sesión 2
Ejercicio 4: análisis grupal del RETO 1
Vamos a analizar juntos el RETO 1
Ejercicio 5: análisis individual del RETO 1
Ahora te daré unos minutos para que revises de nuevo el RETO 1 y preguntes tus dudas.
Ejercicio 6: ¿Qué es el endian?
Analicemos el siguiente asunto:
Cuando trabajamos con protocolos binarios es necesario transmitir variables que tienen una longitud mayor a un byte. Por ejemplo, los números en punto flotante cumplen con el estándar IEEE754 y se representan con 4 bytes.
Algo que debemos decidir al trabajar con número como los anteriormente descritos es el orden en cual serán transmitidos sus bytes. En principio tenemos dos posibilidades: transmitir primero el byte de menor peso (little endian) o transmitir primero el byte de mayor peso (big endian). Al diseñar un protocolo binario deberemos escoger una de las dos posibilidades.
Ejercicio 7: transmitir números de 16 bits
¿Cómo transmitir un número de 16 bits?
void setup() {
Serial.begin(115200);
}
void loop() {
//vamos a transmitir el 16205
static uint16_t x = 0x3F4D;
if (Serial.available()) {
if (Serial.read() == 's') {
Serial.write((uint8_t)( x & 0x00FF));
Serial.write( (uint8_t)( x >> 8 ));
}
}
}
¿Qué endian estamos utilizando en este caso?
Ejercicio 8: transmitir números en punto flotante
¿Cómo transmitir un número en punto flotante?
Veamos dos maneras:
void setup() {
Serial.begin(115200);
}
void loop() {
// 45 60 55 d5
// https://www.h-schmidt.net/FloatConverter/IEEE754.html
static float num = 3589.3645;
if(Serial.available()){
if(Serial.read() == 's'){
Serial.write ( (uint8_t *) &num,4);
}
}
}
Es posible que queramos copiar los bytes que componen el número previamente en un arreglo:
void setup() {
Serial.begin(115200);
}
void loop() {
// 45 60 55 d5
// https://www.h-schmidt.net/FloatConverter/IEEE754.html
static float num = 3589.3645;
static uint8_t arr[4] = {0};
if(Serial.available()){
if(Serial.read() == 's'){
memcpy(arr,(uint8_t *)&num,4);
Serial.write(arr,4);
}
}
}
¿En qué endian estamos transmitiendo el número?
Y si queremos transmitir en el endian contrario?
void setup() {
Serial.begin(115200);
}
void loop() {
// 45 60 55 d5
// https://www.h-schmidt.net/FloatConverter/IEEE754.html
static float num = 3589.3645;
static uint8_t arr[4] = {0};
if(Serial.available()){
if(Serial.read() == 's'){
memcpy(arr,(uint8_t *)&num,4);
for(int8_t i = 3; i >= 0; i--){
Serial.write(arr[i]);
}
}
}
}
Ejercicio 9: aplicación interactiva
Y ¿Cómo hacemos para recibir la información en la aplicación interactiva?
En este punto ya sabemos hacer varias cosas:
Inicializar el puerto
Enviar bytes
Saber si hay datos en el puerto serial
Leer los bytes
Por ejemplo, el siguiente código utiliza las cosas que ya sabemos usar y permite leer los bytes que se están enviando desde el arduino (programa en ell arduino el código del ejercicio anterior).
using System;
using System.IO.Ports;
namespace serialRFID
{
class Program{
static void Main(string[] args)
{
SerialPort _serialPort = new SerialPort();
_serialPort.PortName = "/dev/ttyUSB0";
_serialPort.BaudRate = 115200;
_serialPort.DtrEnable = true;
_serialPort.Open();
byte[] data = {0x73};
_serialPort.Write(data,0,1);
byte[] buffer = new byte[4];
while(true){
if(_serialPort.BytesToRead >= 4){
_serialPort.Read(buffer,0,4);
for(int i = 0;i < 4;i++){
Console.Write(buffer[i].ToString("X2") + " ");
}
Console.ReadKey();
_serialPort.Write(data,0,1);
}
}
}
}
}
Ejercicio 10: ¿Cómo convertir los bytes recibidos a un número?
Y si queremos que la aplicación interactiva lea los 4 bytes y lo convierta al número en punto flotante?
Pero antes de comenzar, ¿En qué endian se envía el número en punto flotante del ejercicio 8?
using System;
using System.IO.Ports;
namespace serialRFID
{
class Program{
static void Main(string[] args)
{
SerialPort _serialPort = new SerialPort();
// Allow the user to set the appropriate properties.
_serialPort.PortName = "/dev/ttyUSB0";
_serialPort.BaudRate = 115200;
_serialPort.DtrEnable = true;
_serialPort.Open();
byte[] data = {0x73};
_serialPort.Write(data,0,1);
byte[] buffer = new byte[4];
while(true){
if(_serialPort.BytesToRead >= 4){
_serialPort.Read(buffer,0,4);
for(int i = 0;i < 4;i++){
Console.Write(buffer[i].ToString("X2") + " ");
}
Console.WriteLine();
Console.WriteLine(System.BitConverter.ToSingle(buffer,0));
byte [] bufferReverse = new byte[4];
for(int i = 3; i>= 0; i--) bufferReverse[3-i] = buffer[i];
Console.WriteLine(System.BitConverter.ToSingle(bufferReverse,0));
Console.ReadKey();
_serialPort.Write(data,0,1);
}
}
}
}
}
Trabajo autónomo 2
(Tiempo estimado 1 hora 20 minutos)
RETO 2
REPASA todo lo visto hasta ahora. Una vez lo hagas resuelve el reto.
Para este reto vas a implementar dos aplicaciones: microcontrolador y aplicación interactiva (tipo consola aún) que realicen el siguiente protocolo:
La aplicación interactiva solicita datos con el byte C4.
El microcontrolador le responde con un paquete compuestos de tres números en punto flotante, un entero con signo de 32 bits más un checksum que se calcula como en el reto 1. Por tanto, se estará transmitiendo un paquete con un tamaño total de 17 bytes.
Si el paquete llega correcto a la aplicación interactiva, esta responde con un 3E, de lo contrario manda un B0 y el microcontrolador deberá reenviar de nuevo el mismo paquete.
Si esto se repite 3 veces el microcontrolador colocará un LED a prender y apagar a 500Hz para marcar un el ERROR durante 3 segundos. Luego regresará a esperar por solicitud de datos, es decir, a esperar de nuevo el C4. Eso quiere decir que la aplicación interactiva tendrá que renunciar al paquete y pedir uno nuevo.
Sesión 3
En esta sesión vas a terminar el RETO 2. Nota que no hay alerta de spoiler para este reto. LA IDEA es que te comprometas a solucionarlo por tu propia cuenta.
Trabajo autónomo 3
Termina y repasa el RETO 2. Será súper IMPORTANTE que lo termines para poder realizar la evaluación.
Evaluación de la Unidad 3
(Tiempo total estimado: 5 horas).
Nota
REPOSITORIO DE ENTREGA
En este enlace dejo tu repositorio para que subas las evidencias de tu trabajo. En una carpeta coloca el código del PC y en otra el código del arduino.
Enunciado
Vas a trabajar solo o con otra persona.
Vas a realizar dos aplicaciones interactivas. Una para el PC tipo consola y la otra para el microcontrolador. Las aplicaciones deben intercambiar información usando únicamente un protocolo binario.
Considera:
La aplicación interactiva solo tendrá un hilo, pero este usará la técnica de programación no bloqueante mediante máquinas de estados y eventos.
La aplicación interactiva solicita datos con el byte 2A.
El microcontrolador le responde con un paquete compuestos de tres números en punto flotante, un entero con signo de 32 bits más un checksum que se calcula como en el reto 1. Por tanto, se estará transmitiendo un paquete con un tamaño total de 17 bytes.
Si el paquete llega correcto a la aplicación interactiva, esta responde con el byte 3E, de lo contrario manda el byte B0 y el microcontrolador deberá reenviar de nuevo el mismo paquete.
Al tercer envío del byte B0 el microcontrolador ya no enviará el paquete sino que colocará un LED a prender y apagar a 1Hz para marcar el ERROR durante 3 segundos. Luego regresará a esperar por solicitud de datos, es decir, a esperar de nuevo el 2A. Eso quiere decir que la aplicación interactiva tendrá que renunciar al paquete y pedir uno nuevo.
Usa little endian para las comunicaciones.
La velocidad de comunicación entre las aplicaciones será de 115200.
Para verificar el cálculo del checksum puedes utilizar este sitio.
La aplicación interactiva simulará un escenario bueno con la tecla R. En este escenario enviará el byte 2A y una vez reciba la respuesta, calculará el checksum, mostrará en pantalla si es correcto y luego enviará el byte 3E.
La aplicación interactiva simulará un escenario con errores mediante la tecla E. En este caso solicitará datos con el byte 2A y luego enviará tres veces el byte B0 para inducir el error en el microcontrolador. Finalmente volverá a esperar la simulación de un nuevo escenario.
Criterios de calificación
Prueba con la aplicación interactiva del profesor: 2.5
Prueba con el microcontrolador del profesor: 2.5